About the Book
Introduction to Autonomous Driving is a comprehensive and hands-on guide to the science, engineering, and societal dimensions of autonomous vehicle (AV) technology. Designed for students, researchers, and practitioners, the book bridges foundational theory with practical implementation, offering a multidisciplinary exploration of artificial intelligence, robotics, embedded systems, and transportation engineering.
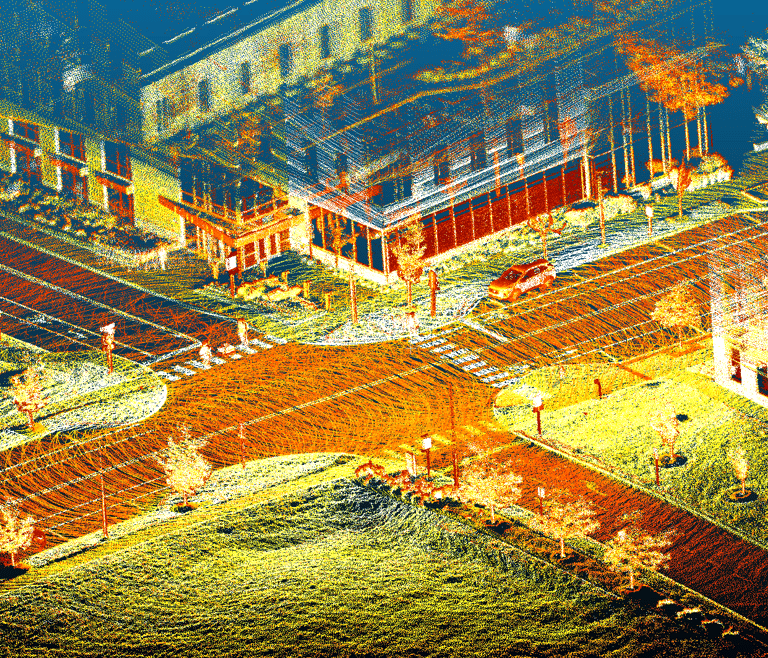
Structured in fourteen chapters, the text mirrors the layered architecture of an autonomous vehicle—from perception and localization to decision-making, control, and system integration. It balances conceptual clarity with applied learning, enabling readers to experiment with real-world frameworks such as BlueICE, CARLA, and Autoware.Universe.
Key Features
Comprehensive Coverage: Explores all major components of AV systems—sensing, localization, planning, control, computing, security, and simulation.
Hands-On Learning: Integrates simulation-based exercises and code examples, emphasizing practical experimentation.
Ethical and Societal Reflection: Encourages responsible innovation through structured ethics discussions and real-world case studies.
Multidisciplinary Insight: Draws from computing systems, control theory, edge computing, and policy studies to build a complete understanding of AV ecosystems.
Educational Readiness: Ideal for both classroom instruction and independent study, with exercises at the end of each chapter.
Authors


Weisong Shi is an Alumni Distinguished Professor and Chair of the Department of Computer & Information Sciences at the University of Delaware, where he leads the Connected and Autonomous Research (CAR) Laboratory. His research focuses on edge computing, vehicle computing, and autonomous driving, and he is widely recognized for his pioneering contributions to edge computing. Dr. Shi is a Fellow of the IEEE, an ACM Distinguished Scientist, and serves as Editor-in-Chief of IEEE Internet Computing and Elsevier Smart Health. He serves as the honorary director of the NSF eCAT Center on Electric, Connected, and Autonomous Technologies (eCAT), advancing research at the intersection of computing and mobility.
Yuankai William He is a Ph.D. candidate in the Department of Computer and Information Sciences at the University of Delaware. His research focuses on autonomous driving, vehicle-to-everything (V2X) communication, and edge computing, with an emphasis on improving the safety, efficiency, and reliability of intelligent transportation systems. In Fall 2025, he taught the inaugural course on "Introduction to Autonomous Driving."