Chapter 4 V2X Communications
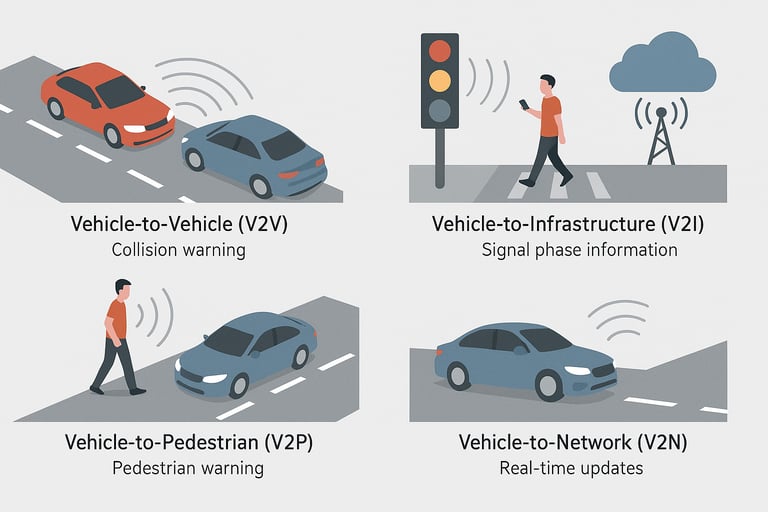
The transformation of transportation through autonomous driving is not solely a matter of more intelligent vehicles but of increasingly connected environments. Even with advanced perception systems, autonomous vehicles (AVs) face limitations arising from occlusions, restricted sensor ranges, or delayed detection of environmental changes. Such constraints inhibit real-time, fully informed decision-making, particularly in complex urban scenarios. Vehicle-to-Everything (V2X) communication addresses these challenges by allowing vehicles to transmit and receive information beyond the scope of their onboard sensors.
Additional Readings
He, Y., & Shi, W. (2024). A Vision for Transformative Intersections. Computer, 57(12), 58-68.
Wu, T., Wang, S., Bao, Y., & Shi, W. (2024, October). Tentacles: A Middleware with Multi-Network Communication Reliability for Vehicle-Infrastructure Cooperative Autonomous Driving. In 2024 IEEE 100th Vehicular Technology Conference (VTC2024-Fall) (pp. 1-8). IEEE.
He, Y., Wu, B., Dong, Z., Wan, J., & Shi, W. (2023). Towards c-v2x enabled collaborative autonomous driving. IEEE Transactions on Vehicular Technology, 72(12), 15450-15462.