Chapter 14 Conclusion
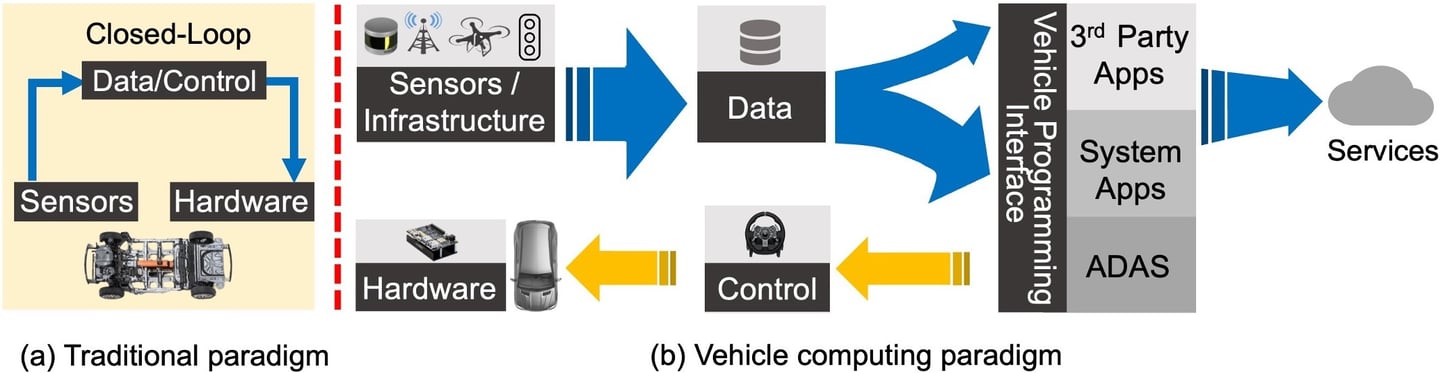
As autonomous vehicles evolve, a transformative vision is taking hold—one that recognizes the vehicle itself not merely as a transport mechanism or isolated computational endpoint, but as a full-fledged, mobile computing platform embedded in a broader cyber-physical ecosystem. This vision is captured by the emerging Vehicle Computing (VC) paradigm, which redefines how vehicles engage with their environment, infrastructure, and other agents. In contrast to conventional vehicle architectures that prioritize centralized processing or cloud reliance, VC enables distributed, real-time intelligence. Vehicles, under this model, are seen as computationally self-sufficient while remaining in constant interaction with peer vehicles and edge infrastructure. This dual capacity—localized autonomy with coordinated collaboration—marks a foundational departure in system design. The VC paradigm situates the vehicle as an active node within a distributed system of sensors, processors, energy reservoirs, and data sources. This reconceptualization supports new forms of real-time computation, cooperative sensing, and distributed intelligence that transcend conventional autonomous driving architectures.